Регуляторы температуры и терморегуляторы
Цифровой регулятор – устройство, предназначенное для автоматического поддержания технологического параметра в заданных пределах.
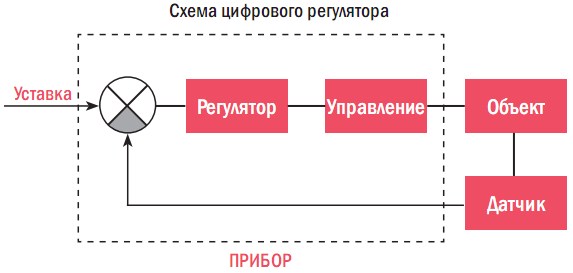
Прибор воспринимает уставку технологического параметра через интерфейс пользователя, измеряет текущее значение параметра и воздействует на его изменение.
Регуляторы оснащаются измерительным входом, способным работать с основными типами термопар и термосопротивлений, а также со стандартными аналоговыми сигналами (0...20 мА, 4...20 мА, 0...5 В, 0...10 В). Число параметров программирования простого регулятора может достигать нескольких десятков.
По типу регулирования в основном различаются релейные и ПИД-регуляторы. Релейные (позиционные) регуляторы просты в эксплуатации и настройке. С их помощью можно решать такие задачи, в которых нет жестких требований к перерегулированию и точности поддержания параметра в нужных пределах. Пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор) позволяет настроить процесс регулирования максимально точно с оптимальным выходом на уставку. Довольно трудно бывает настроить коэффициенты ПИД-регулятора, но наличие в современных приборах возможности автонастройки позволяет свести эту проблему к минимуму.
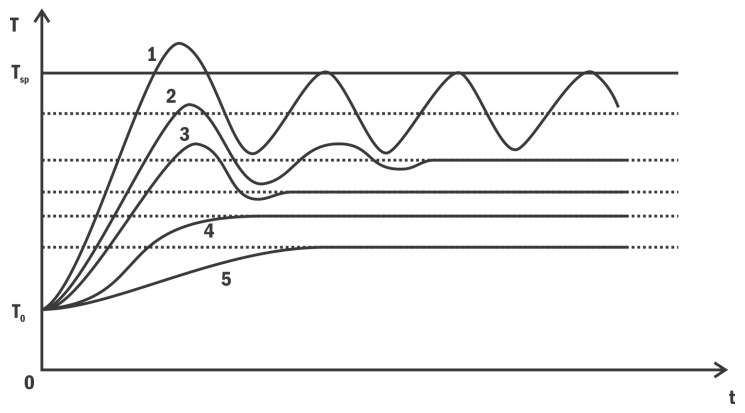
На графике изображены зависимости температуры от времени при различных коэффициентах ПИД-регулирования.
1 – значение зоны пропорциональности очень мало, переходная характеристика далека от оптимальной.
2 – в переходной характеристике наблюдаются затухающие колебания (5–6 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД-регулятора, то выбранное значение зоны пропорциональности является оптимальным. Для этого случая настройка зоны пропорциональности считается законченной.
3 – этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы (перегревы) при переходе с одной температуры на другую.
4 – этот тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
5 – сильно затянутый подход к установившемуся значению говорит о том, что зона пропорциональности чрезмерно велика.
Программный ПИД-регулятор позволяет осуществлять пошаговое управление различными процессами термообработки. Для каждого шага программы могут быть заданы свои температура и длительность.
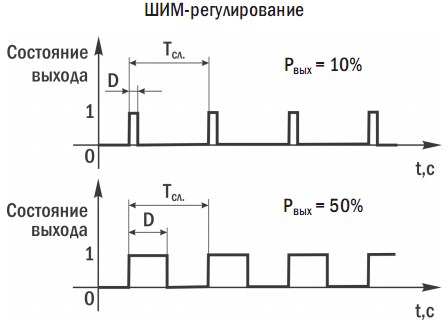
По методу выходного воздействия на объект можно выделить ШИМ-регулирование и непрерывный вывод. При импульсном регулировании управление нужным уровнем мощности происходит с помощью включения полной мощности на заданное время. При непрерывном способе сигнал управления выводится через ЦАП.
Основными логическими элементами, применяемыми в приборостроении, являются электромагнитные реле,
но при высокой частоте переключения реле могут быстро выходить из строя, и в основном они применяются для релейного способа регулирования. При ПИД-регулировании часто используют оптосимисторные и транзисторные логические выходы с высокой предельной частотой переключения.
Схема выбора регуляторов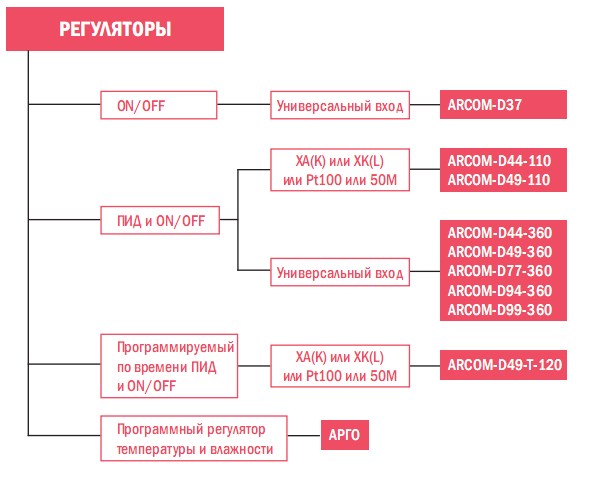
- 1
- 2

















