Энкодеры
Датчики угла поворота (энкодеры)
![]()




Датчиками угла поворота или энкодерами называют устройства, при помощи которых можно определять положение вращающихся валов. Различают инкрементальные (инкрементные) энкодеры и абсолютные энкодеры.
Инкрементальные энкодеры имеют импульсные выходы, при повороте на определённый угол на выходе генерируется импульс напряжения. На выходе у абсолютных энкодеров генерируется цифровой код, уникальный для каждого положения вала. Помимо контроля положения вращающихся валов, при помощи энкодеров можно ещё измерять длину, расстояние (инкрементальный энкодер с мерным колесом) или задавать перемещение инструмента на станке с ЧПУ в ручном режиме (инкрементальный энкодер-штурвал).
Примеры применений:
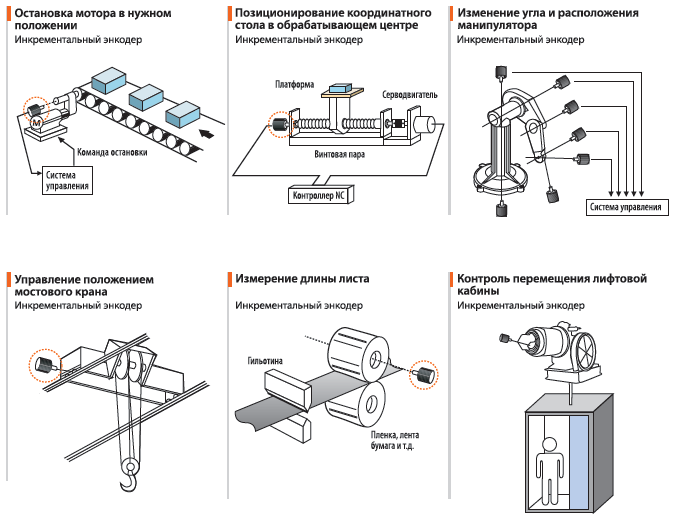
Датчики углового и линейного перемещения, датчики наклона
Инкрементальные энкодеры
Инкрементальный энкодер (Incremental Encoder) регистрирует относительное перемещение (приращение). Разрешение (Resolution) углового энкодера определяется количеством импульсов на один оборот (на рисунке изображён оптический дик с разрешением 8 имп/об).
Частота импульсов на выходе энкодера пропорциональна скорости вращения.

Система управления должна подсчитывать импульсы, чтобы вычислить угол поворота энкодера относительно точки отсчёта.
В системах, работающих с абсолютными координатами (станок с ЧПУ), перед началом работы (после включения питания) необходимо выставить ноль – вывести рабочий орган машины в опорную (реперную) точку и в ней обнулить счётчик импульсов.
Синусно-косинусные инкрементальные датчики положения sin/cos 1-Vss и 1-Vpp
Синусоидальные выходные сигналы А и В сдвинуты друг относительно друга на 90 градусов, что позволяет определять направление вращения. Сигнал нулевой метки R используется для синхронизации с точкой отсчёта. Для повышения помехозащищённости датчик выдаёт ещё три инверсных сигнала: A, B, R. Оцифровываются эти сигналы в системе измерения.
Датчики с интерфейсом 1-Vpp используются в сервосистемах, т.к. как позволяют получать очень высокое разрешение. Так, например, если датчик выдаёт 2048 периодов синусоиды (импульсов) на оборот, а система управления в каждой такой синусоиде различает 2048 дискретных уровней, то общее разрешение датчика составит 2048 х 2048 = 4194304 импульсов на оборот.
Инкрементальные датчики с интерфейсом TTL или HTL
Эти датчики сами оцифровывают синусоидальные сигналы – у них на выходе 6 прямоугольных сигналов - три прямых: A, B, R и три инверсных: A, B, R. Для сигнализации неисправности датчика используется инверсный сигнал помехи (если нет неисправности, то сигнал помехи равен 1).
Абсолютные энкодеры
Разрешение абсолютного энкодера (Absolute Encoder) определяется количеством уникальных кодов на один оборот. Однооборотные (Single-turn) абсолютные энкодеры определяют положение в пределах одного оборота, многооборотные (Multi-turn) – в пределах определённого числа оборотов.
Абсолютные датчики положения не требуют для начала работы выхода в опорную точку – при включении питания датчик сразу определяет координату, сканируя кодовые дорожки.
Резольверы
Резольвер (Resolver) – это аналоговый электромагнитный абсолютный однооборотный датчик, работающий по принципу вращающегося электрического трансформатора.
Рассмотрим работу бесщёточного резольвера.
На статоре расположены три обмотки: первичная обмотка возбуждения вращающегося трансформатора (на неё подаётся переменное напряжение) и две двухфазные обмотки, механически повёрнутые друг относительно друга на 90 градусов: синусная и косинусная. На роторе расположена вторичная обмотка вращающегося трансформатора, которая возбуждается от первичной обмотки на статоре за счёт электромагнитной индукции. Обмотка ротора в свою очередь индуцирует в синусной обмотке статора напряжение пропорциональное синусу угла поворота ротора, а в косинусной обмотке - напряжение пропорциональное косинусу угла поворота ротора.
Резольверы отличаются высокой надёжностью (они не бьются и не запотевают, как оптические) и точностью (аналоговые, а не дискретные).
Код Грея
Код Грея (Gray Code) – это двоичный код, в котором два соседних значения отличаются только одним разрядом.
| Десятичное число |
Двоичное число |
Код Грея |
|---|---|---|
| 0 | 000 | 000 |
| 1 | 001 | 001 |
| 2 | 010 | 011 |
| 3 | 011 | 010 |
| 4 | 100 | 110 |
| 5 | 101 | 111 |
| 6 | 110 | 101 |
| 7 | 111 | 100 |
Формула побитного преобразования двоичного кода в код Грея
Gi = Bi⊕Bi+1,
биты нумеруются справа налево, ⊕ – исключающее ИЛИ (если биты равны, то результат равен 0; если биты не равны, то результат равен 1).
Код Грея используется для кодирования положений в абсолютных датчиках, так как обладает большей помехозащищённостью, чем обычное двоичное кодирование (Natural Binary).
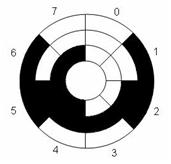
На рисунке изображён оптический диск с 3-х разрядным (8 положений) кодом Грея.
Тахогенераторы
Тахогенераторы предназначены для определения скорости и направления вращения. Напряжение на выходе тахогенератора пропорционально скорости вращения вала.
Как выбрать
Датчики линейного и кругового перемещения
- Перемещение
- Круговое (угловое)
- Линейное.
- Принцип действия
- Оптические, электромагнитные, механические
- Импульсные или непрерывные
- Инкрементальные или абсолютные.
- Разрешение
- Импульсов на оборот (для круговых)
- Миллиметров, микрон (для линейных).
- Круговые датчики
- Вал
- Конструкция вала (цельный, полый)
- Диаметр
- Подшипники (если нужны).
- Вал
- Инкрементальные энкодеры
- Тип выходного сигнала
- TTL 5В (RS-422)
- HTL 8..30В
- Sin/cos 1Vss
- Sin/cos 1Vpp.
- Тип выходного сигнала
- Абсолютные энкодеры
- Тип датчика
- Однооборотные
- Многооборотные.
- Код
- Двоичный
- Грея.
- Тип выходного сигнала
- Синусно-косинусный (резольверы)
- Параллельный
- SSI
- DRIVE-CLiQ
- RS-422 (TTL)
- EnDat
- HIPERFACE
- PROFIBUS DP
- DeviceNet
- CANOpen.
- Тип датчика
- Окружающая среда
- Диапазон рабочих температур
- Степень защиты корпуса
- Класс взрывозащиты.
- Ограничения
- Максимальная рабочая скорость
- Длина кабеля.
Датчики угла наклона (инклинометры)
- Диапазон измерения угла наклона относительно вертикали (например, ±10°)
- Разрешение (0,1°)
- Абсолютная точность (±0,5°)
- Температурный дрейф (±0,5%/K)
- Температурный коэффициент (0,01°/K)
- Калибровка нуля (±5°)
- Воспроизводимость измерения (0,1% от диапазона измерения)
- Выходной сигнал:
- Токовый 4..20мА
- Напряжение 0,1..4,9В
- Напряжение питания
- Защита:
- от обрыва провода
- от обратной полярности
- Степень защиты корпуса (IP67)
- Температура окружающей среды (-30°C..+70°C)
- Подключение:
- Коннектор М12 (папа).
















